
TQ Robotics automatisiert ohne Maschinen-Schnittstelle
An dieser Stelle hatte ich bereits ausgeführt, dass ich Geschäftsführer des Startups VisCheck bin. Dieses hat mit „Opdra“ die erste Software entwickelt, die mittels einer einfachen Kamera einen Fertigungsbildschirm auslesen kann. Dieser Ansatz wurde erstmals im Herbst 2019 als Gemeinschaftsprojekt mit Omron vorgestellt. Allerdings war Opdra damals noch nicht so komfortabel wie heute und hatte daher eher Laborstatus. Dies hat sich durch zwei zwischenzeitlich vorgenommene Ergänzungen maßgeblich geändert.
Besuchen Sie den Deutschen Robotikverband für mehr Informationen.
Opdra 2021
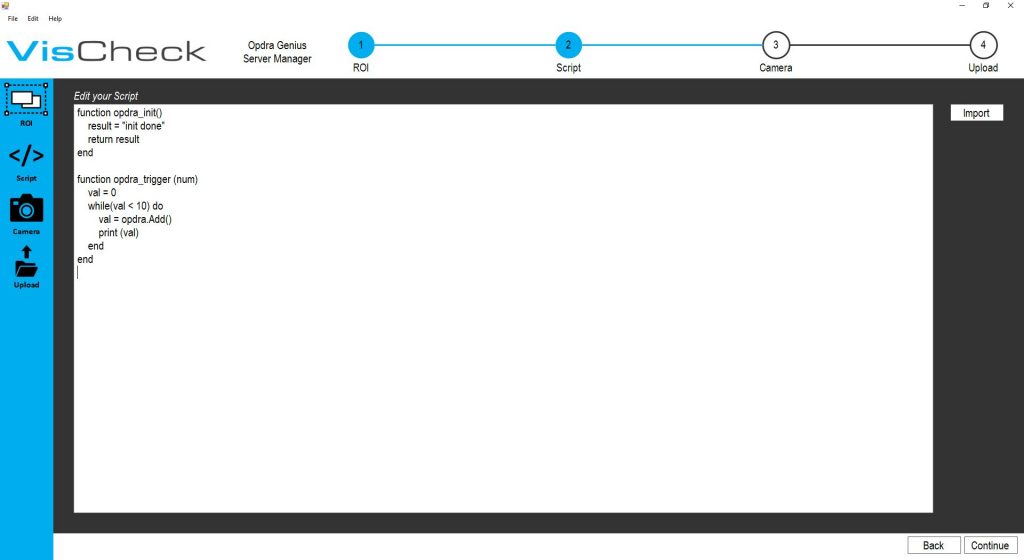
Die relevanten Stellen des Bildschirms können jetzt, zwei Jahre später, einfach vom User markiert werden. Möglich macht dies eine Benutzeroberfläche, die erst in diesem Jahr entwickelt wurde. Dies unterscheidet die aktuelle Lösung von der bereits aus der Vergangenheit bekannten. Denn eines wurde uns bewußt: Der User will eine einfache Lösung. Die im Video unten vorgestellte Lösung konnte binnen eines 1/2 Tages umgesetzt werden. Einerseits mit Markierung der relevanten Stellen des Bildschirmes wie auch mit der Anlage eines Skriptes. Die Skript-Möglichkeit stellt die zweite wesentliche Nutzenerhöhung dar. Wie im Video zu sehen ist, werden beispielsweise die Messwerte ausgelesen. Hier ist das Skript sehr hilfreich: Es wurden einfach Bedingungen hinterlegt wie „wenn Messwert < xx, dann IO-Teil, wenn Messwert > xx, dann NIO-Teil“. D.h. die Kamera liest den Bildschirm, auf Grund des Skriptes erfolgt die Einteilung und somit die Steuerung des Roboters. Der Roboter wird direkt von Opdra gesteuert, so dass der obligatorische Schaltschrank entfällt. Nachdem die NoCode-Programmierung in derRobotik Einzug gehalten gibt, gibt es nun NoSPS.
Durch das optische Auslesen des Bildschirmes bedarf es daher keiner Schnittstelle mehr von Maschine zu Roboter. Schnittstellen sind i.d.R. sehr komplex und damit teuer und natürlich unflexibel. Ein weiterer Vorteil ist die generell hohe Flexibilität von Opdra. Der vorliegende Fall wurde binnen eines guten halben Tages eingerichtet. Selbst wenn es ein oder zwei Tage gewesen wären, es geht schneller als Steuerungsprogrammierungen. Somit ist Opdra auch ideal für wechselnde größere Serien (z.B. eine Woche Teil A, dann Wechsel auf Teil B).
Franka Robot im Vorteil
In dieser Fallstudie wurde ein Cobot mit einer Reichweite von 80 cm und kleinerer Traglast benötigt. Hier war der Franka Robot klar im Vorteil: Er erfüllt diese Kriterien und ist noch dazu einfach zu programmieren, sehr preiswert und sensitiv. Daher war er prädestiniert. Bei Anwendungsfälle mit einem Bedarf an größerer Reichweite oder einer Traglast z.B. von 12 kg kann ein anderer Roboter (z.B. wieder von Omron, Universal Robots, Kuka etc.) ebenfalls problemlos eingesetzt werden.
Fallstudie im Video
Im Video bedient ein Franka Emika Robot absolut selbständig eine Messmaschine, die zuvor von einem Mitarbeiter bedient wurde. Das Video ist dank der von Robert Vogel (TQ Robotics) eingefügten Erläuterungen selbsterklärend.
Ideale Anwendungen
Opdra kommt dann besonders einfach zum Einsatz, wenn heute ein Mitarbeiter nur wenige Tätigkeiten ohne allzu großen Entscheidungsbaum tätigen muß. Im Grunde ist alles abbildbar, doch wird es natürlich kompliziert, wenn das Wissen eines erfahrenen Mitarbeiters in Algorithmen abgebildet werden soll. Branchenrestriktionen gibt es keine. Sehr interessant dürften neben der Fertigung auch Labore sein.
Besuchen Sie den Deutschen Robotikverband für mehr Informationen.

